Robots learning without us? New study cuts humans from early testing
Humans no longer have exclusive control over training social robots to interact effectively, thanks to a new study from the University of Surrey and the University of Hamburg.
The study, which will be presented at this year’s IEEE International Conference on Robotics and Automation (ICRA), introduces a new simulation method that lets researchers test their social robots without needing human participants, making research faster and scalable.
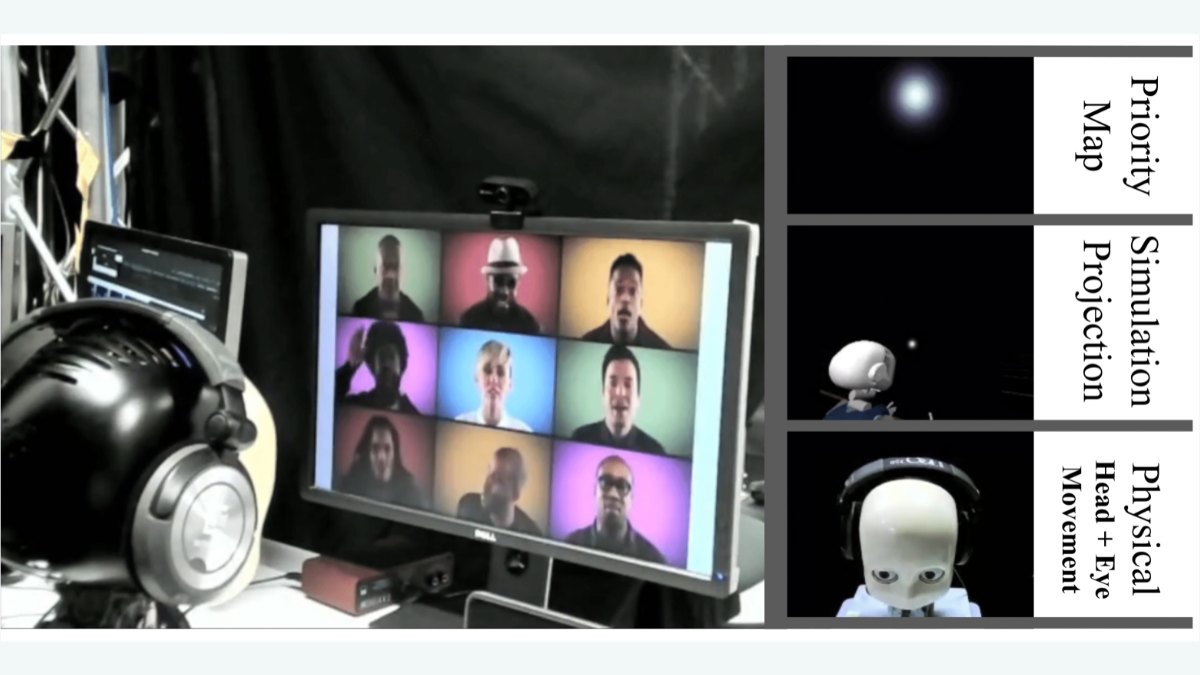
Using a humanoid robot, the research team developed a dynamic scanpath prediction model to help the robot predict where a person would look in a social setting. The model was tested using two publicly available datasets, and the researchers demonstrated that humanoid robots were capable of mimicking human-like eye movements.

Social robots are designed to interact with people using speech, gestures, and expressions, making them useful in education, healthcare, and customer service. Examples of social robots also include Pepper, a retail assistant, and Paro, a therapeutic robot for dementia patients.
The research team matched how their model worked in the real world to that of a simulated one, projecting human gaze priority maps onto a screen to compare the robot's predicted attention focus with real-world data. This allowed for direct evaluation of social attention models in realistic conditions, reducing the need for large-scale human-robot interaction studies in the early phases of research.
Related sustainable development goals

Featured Academics
Media Contacts
External Communications and PR team
Phone: +44 (0)1483 684380 / 688914 / 684378
Email: mediarelations@surrey.ac.uk
Out of hours: +44 (0)7773 479911